Ολα Τα Παιχνιδια

Silverlit Ηλεκτρονικό Robot Beats (7530-88587)
Silverlit Ηλεκτρονικό Robot Beats (7530-88587).Ηλεκτρονικό ρομπότ ROBO BEATS με 2...

BW Σετ Robo Football B/O (3066A)
BW Σετ Robo Football B/O (3066A) Το ρομποτικό παιχνίδι θα χαρίσει στο παιδί...


Silverit Τηλεκατευθυνόμενο Robot Robo Blast One-2 Σχέδια (7530-88589)
Silverit Τηλεκατευθυνόμενο Robot Robo Blast One-2 Σχέδια (7530-88589). Robo Blast One!...


Τηλεκατευθυνόμενο Velociraptor Dino (DINO01)
Τηλεκατευθυνόμενο Velociraptor Dino (DINO01). Πάρτε τον έλεγχο αυτού του...

Tobot Galaxy Detectives Giant V (301120)
Tobot Galaxy Detectives Giant V (301120). Ο θρυλικός συνδυασμός 3 σταδίων Tobot! Το...

Tobot Galaxy Detectives Storm Joe (301107)
Tobot Galaxy Detectives Storm Joe (301107). Ο ήρωας Joe πιο δυνατός από ποτέ!...

Tobot Galaxy Detectives Mini Sergeant Justice (301099)
Tobot Galaxy Detectives Mini Sergeant Justice (301099). Μικρό αλλά πολύ δυνατό! Εύκολη...

Tobot Galaxy Detectives Mini Shuttle (301098)
Tobot Galaxy Detectives Mini Shuttle (301098). Μικρό αλλά πολύ δυνατό! Εύκολη...

Tobot Galaxy Detectives Mini Monster (301097)
Tobot Galaxy Detectives Mini Monster (301097). Μικρό αλλά πολύ δυνατό! Εύκολη...

Tobot Galaxy Detectives Mini Speed (301096)
Tobot Galaxy Detectives Mini Speed (301096). Μικρό αλλά πολύ δυνατό! Εύκολη...

Tobot Galaxy Detectives Monster (301086)
Tobot Galaxy Detectives Monster (301086). Το φορτηγό τέρας! Τοποθέτησε το κλειδί...

Silverlit Set 2 Τηλεκατευθυνόμενο Robot Kombat Vking (7530-88059)
Silverlit Set 2 Τηλεκατευθυνόμενο Robot Kombat Vking (7530-88059).Robo Kombat Viking! Τα...

Silverlit Τηλεκατευθυνόμενο Robot Macrobot (7530-88045)
Silverlit Τηλεκατευθυνόμενο Robot Macrobot (7530-88045).Το προγραμματιζόμενο...

Robo Alive Dino Wars Stegosaurus (1863-27131)
Robo Alive Dino Wars Stegosaurus (1863-27131).Ο νέος Robo Alive Στεγόσαυρος είναι...

Squeakee Ηλεκτρονικό Διαδραστικό Μπαλονο-Σκυλάκι (QUA00000)
Squeakee Ηλεκτρονικό Διαδραστικό Μπαλονο-Σκυλάκι (QUA00000).Ο Squeakee...

Tobot Rescue C (301014)
Tobot Rescue C (301014). Το πρώτο animated διασωστικό Tobot , Tobot rescue C...

Silverlit Τηλεκατευθυνόμενο Robot Robo Blast Λευκό (7530-88061)
Silverlit Τηλεκατευθυνόμενο Robot Robo Blast Λευκό (7530-88061). Το Robo Blast είναι...

Robosapien Ρομπότ (RBA02000)
Robosapien Ρομπότ (RBA02000). Το WowWee Robosapien είναι ένα τηλεκατευθυνόμενο...

Roboraptor Δεινόσαυρος Ρομπότ (RBA01000)
Roboraptor Δεινόσαυρος Ρομπότ (RBA01000). Το WowWee Roboraptor είναι ένα...
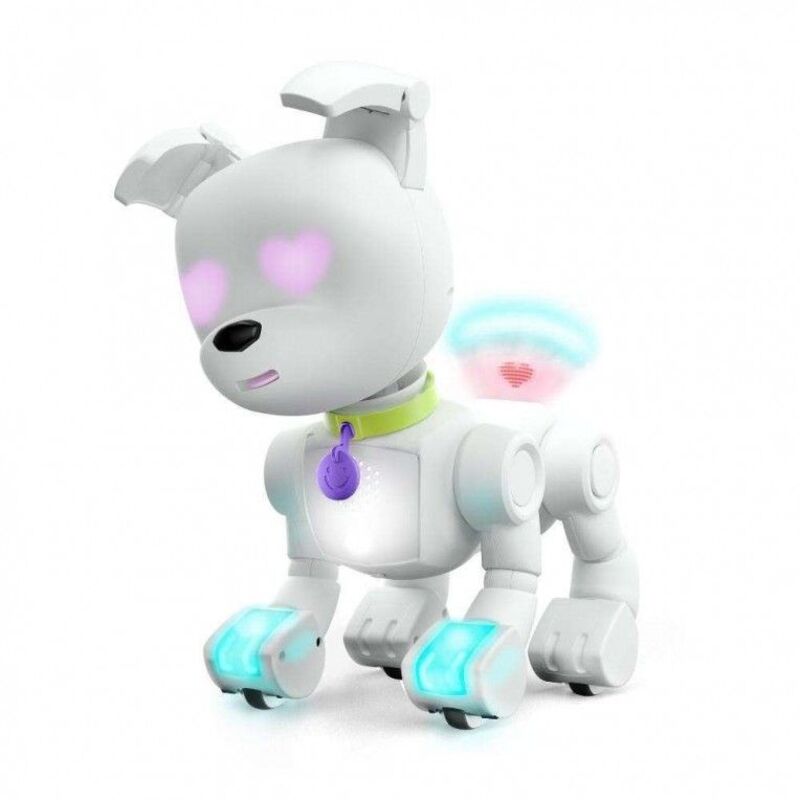
Dog-E Ρομπότ Σκύλος Με Κινήσεις,Ήχους Και Αντιδράσεις (MTD00000)
Dog-E Ρομπότ Σκύλος Με Κινήσεις,Ήχους Και Αντιδράσεις (MTD00000)....

Silverlit Τηλεκατευθυνόμενο Robot Kombat (7530-88052)
Silverlit Τηλεκατευθυνόμενο Robot Kombat (7530-88052).Tο Robo Kombat περιλαμβάνει...

Silverlit Τηλεκατευθυνόμενο Robot Robo Up (7530-88050)
Silverlit Τηλεκατευθυνόμενο Robot Robo Up (7530-88050).Τηλεκατευθυνόμενο...

Tobot Galaxy Detectives Sergeant Justice (301088)
Tobot Galaxy Detectives Sergeant Justice (301088). Το περιπολικό της αστυνομίας!...

Tobot Galaxy Detectives Shuttle (301087)
Tobot Galaxy Detectives Shuttle (301087). Το διαστημικό λεωφορείο! Τοποθέτησε το...

Tobot Galaxy Detectives Speed (301085)
Tobot Galaxy Detectives Speed (301085).Το αγωνιστικό αυτοκίνητο! Τοποθέτησε το...

Silverlit Τηλεκατευθυνόμενο Robot Robo Dr7 (7530-88046)
Silverlit Τηλεκατευθυνόμενο Robot Robo Dr7 (7530-88046). Robo DR7!...

Silverlit Set 2 Τηλεκατευθυνόμενα Robo Kombat Mega Fist (7530-88068)
Silverlit Set 2 Τηλεκατευθυνόμενα Robo Kombat Mega Fist (7530-88068). Robo Kombat! Τα...

BW Σκυλάκι B/O Walking W/L & S (09-839)
BW Σκυλάκι B/O Walking W/L & S (09-839)

WowWee Fingerlings Untamed TRex-4 Σχέδια (37810)
WowWee Fingerlings Untamed TRex-4 Σχέδια (37810).Κάθε Untamed χαρακτήρας έχει 2...
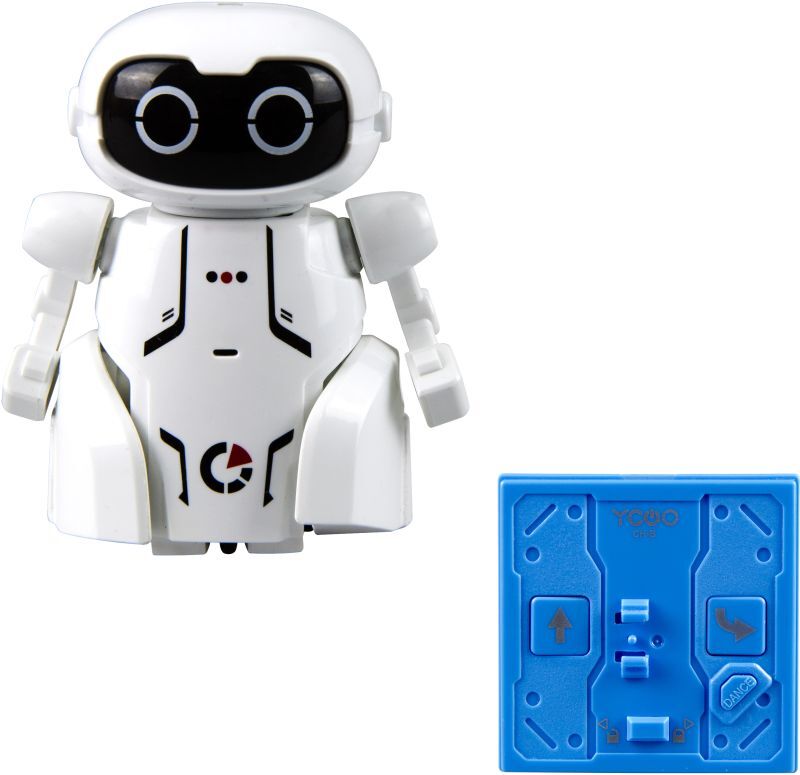
Silverlit Ηλεκτρονικό Robot Mini Droid-2 Σχέδια (7530-88058)
Silverlit Ηλεκτρονικό Robot Mini Droid-2 Σχέδια (7530-88058).Μίνι ηλεκτρονικό...

WowWee Fingerlings Baby Dragon-4 Σχέδια (3580)
WowWee Fingerlings Baby Dragon-4 Σχέδια (3580).Ηλεκτρονικό μωράκι δρακάκι, που...

BW Σετ Phantom Fighting Robot B/O (601-2)
BW Σετ Phantom Fighting Robot B/O (601-2)


WowWee Fingerlings Untamed Skeleton-2 Σχέδια (3980)
WowWee Fingerlings Untamed Skeleton-2 Σχέδια (3980).Κάθε Untamed χαρακτήρας έχει 2...

WowWee Fingerlings Untamed Dire Wolf-2 Σχέδια (3960)
WowWee Fingerlings Untamed Dire Wolf-2 Σχέδια (3960).Κάθε Untamed χαρακτήρας έχει 2...

WowWee Fingerlings Glitter Monkey-4 Σχέδια (3760A)
WowWee Fingerlings Glitter Monkey-4 Σχέδια (3760A). Ηλεκτρονικό μαϊμουδάκι glitter,...

Silverlit Τηλεκατευθυνόμενο Robot Programm A Bot X (7530-88071)
Silverlit Τηλεκατευθυνόμενο Robot Programm A Bot X...

BW Robot Talking President B/O – 2 Σχέδια (7088)
BW Robot Talking President B/O – 2 Σχέδια (7088). ΠΡΟΣΟΧΗ!!! Πριν ολοκληρώσετε...

BW Δεινόσαυρος (WS5332)
BW Δεινόσαυρος (WS5332) με κίνηση.Το στόμα ανοιγοκλείνει με τη...

